Drones desde cero.

En unos cuantos días es la platica en el Arduino Day en The Inventor’s House ( http://theinventorhouse.org/home ), veamos un poco de historia de The Inventor’s House:
The Inventor`s House fundada en el 2013. Su objetivo es crear el mejor lugar hackerspace y co-working en el que gente de todas las edades y niveles de habilidad con intereses comunes, en computadoras, tecnología, ciencia, electrónica, mecánica, diseño gráfico, programación web, programación móvil se reúnen para aprender, socializar y colaborar.
Nuestra presentación esta agendada para el 29 de Marzo de 13:00 PM a 14:00 PM, te dejo el evento de facebook, espero nos puedas acompañar.
https://www.facebook.com/events/1453727001524866/
Aquí un vídeo de una de las primeras pruebas que hicimos de nuestro drone, mi equipo y yo estábamos muy ansiosos por oír las hélices cortar el aire.
¿De que se trata esta página?
Durante la charla habrá muchos conceptos que se van a mencionar de forma general o muy sencilla, el motivo principal de esta página es proveer todas las fuentes de información posible que se encuentran en Internet respecto a nuestra charla.
Les dejo la presentación del Arduino Day (Como no tenía mi máquina no pude mostrarla):
Cuatrirotor con Raspberry Pi, MagPi 19
Esta fue una de las más grandes inspiraciones y punto de inicio (pero no el mejor punto de inicio), tenía bastantes dudas de si realmente la Raspberry podría manejar todo el sistema de control, lo único que puedo decir es que el desarrollo del software para el manejo del hardware mejora día con día, definitivamente un recurso que no te puedes perder si piensas usar una Raspberry.

Sensores de Inercia
Un punto clave para el dron son los sensores inerciales, estos sensores permiten calcular los ángulos de ubicación de un objeto en el aire, pero no hay que irnos con la finta de que son sensores libres de problemas, al contrario, cada sensor tiene sus problemas y los problemas de uno pueden ser (o intentar ser) compensados por otros sensores. Para nuestro dron usamos dos IC:
MPU6050 (Acelerometro + Giroscopio)

HMC5883L (Magnetómetro o Brújula digital)

Puedes ver unos códigos para leer estos sensores en la Raspberry Pi en los siguientes enlaces (instala wiringPi con I2C antes de continuar):
https://github.com/tejonbiker/Earhart/tree/master/RaspberryPi/src/HMC5883L
https://github.com/tejonbiker/Earhart/tree/master/RaspberryPi/src/mpu6050_test
Ángulos de Orientación
Son básicamente tres: yaw, pitch y roll (traducido es: guiñada, cabeceo y alabeo), estos son los ángulos de giro respecto a los ejes coordenados.

Cálculos de ángulos de orientación.
Este proceso tiene sus variantes, en los siguientes enlaces puedes encontrar más detalles:
Tilt Sensing Using a Three-Axis Accelerometer, Freescale Semiconductor
THE QUADCOPTER : HOW TO COMPUTE THE PITCH, ROLL AND YAW
El filtro complementario parece ser un excelente compromiso entre desempeño y computo.
El magnetómetro es un sensor muy especial, hacer cálculos de ángulos a partir de su información puede ser particularmente difícil.
Triple Axis Magnetometer HMC5883L + Arduino
Para tener una medición más exacta del magnetómetro se puede aplicar una compensación de inclinación, el siguiente PDF es muy ameno explicando este proceso.
AN3192, Using LSM303DLH for a tilt compe
nsated electronic compass
En la red encontré un algoritmo abierto para IMUs (Inertial Motion Unit), la demostración la hacen con hardware propio de la página (que también puedes comprar), tiene resultados muy interesantes.
Open source IMU and AHRS algorithms
Control de Posición
Se tienen motores colocados sobre un mismo plano ¿Como se controlan los ángulos de orientación? ¿Como mezclamos las señales de control para los motores necesarios?, estas no son preguntas fáciles de responder, los principios básicos de un cuatrirotor se puede ver en
Build A Quadcopter From Scratch – Hardware Overview
El siguiente enlace se muestra un control muy sencillo, habrá que probarlo para ver si se adapta bien a 6 motores.
THE QUADCOPTER : CONTROL THE ORIENTATION
He tenido la oportunidad de leer algunos artículos científicos acerca del modelado matemático y del control de un hexacóptero, desafortunadamente todavía no encuentro algún articulo de acceso libre.
FPV (First Person Video o video de retroalimentación en tiempo real)
Uno de los motivos por lo cuales escogimos hacer todo por WiFi es la capacidad de manejar toda la información por el mismo canal de comunicación, ahorrando hardware y dando una conectividad más flexible. El dron tendrá una webcam usb que estará enviando video a 30 fps a una resolución de 320×240, el software del lado del dron es el MJPEG-Streamer, un software muy fácil de usar, este software básicamente extrae fotogramas de la cámara en JPEG y las envía por medio de una petición http que nunca acaba.
http://www.robertcudmore.org/blog/?p=273
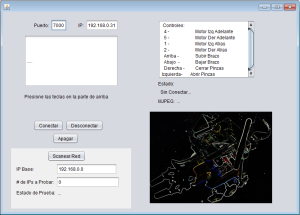
Del lado de la computadora voy a reciclar una interfaz en Java que tenía para otro robot que tenía el mismo sistema de envío de vídeo, el vídeo se muestra donde se ve la imagen en alto contraste.
Ardupilot Mega
Ardupilot es un proyecto de código abierto basado en Arduino y su enfoque principal es el control de drones, este proyecto esta patrocinado por 3DRobotics, este proyecto (más en específico esta página) me ha ayudado en el diseño del controlador basado en Raspberry.

Propulsión
Un multirotor (cuatrirotor, hexarotor o octarotor) es en esencia la misma combinación de Hélices, Motores y controladores de motores, solo multiplicado por el número de rotores. En definitiva esta es el área con más incertidumbre, un motor con hélice tiene un parámetro llamado empuje (thrust y esta dada en gramos) que es en escencia la fuerza generada por el giro de la hélice.
El empuje es dependiente de la geometría de la hélice (longitud e inclinación) y también de las RPM .
Los motores usados son BLM (Brushless Motor, motor sin escobillas), estos motores tienen un parámetro llamado kV, esto puede ser interpretado como RPM/V (RPM desarrolladas por cada unidad de voltio), para saber las RPM del motor solo basta multiplicar el kV por el voltaje, por ejemplo, un motor de 1000 kV a 11.1 V dará 11,100 RPM. Estas RPM son a las que girarán las hélices, lo que significa que el parámetro kV también forma parte de los cálculos del empuje.
Los BLM con una hélice y girando a ciertas RPM consumirán corriente, los motores sin carga consumen alrededor de 1 A (esto depende de la alimentación), cuando se agrega una hélice el consumo de corriente subirá significativamente, pasará de 0.5 A a varios amperes (tal vez por arriba de 10).
Una vez que se sabe que corriente se va a consumir por motor es necesario adquirir el controlador de velocidad para el voltaje y corriente (hay que hacer énfasis en la corriente) adecuados.
¿Que significa todo esto? lo que significa que el empuje termina siendo función de muchos parámetros, algunos ni si quiera se especifican a la hora de comprar (como por ejemplo el consumo de corriente con una hélice en especifico), si no se tiene información de consumo de corriente y empuje con una hélice lo único que queda es a prueba y error.
Los motores para multirotor se recomiendan en el rango de 1000 kV, las hélices van desde 7 pulgadas hasta 12 pulgadas (inclusive hay más grandes, pero a mi parecer 12 pulgadas es algo ya bastante grandes), las hélices tienen la siguiente nomenclatura: 9050, donde 90=9 pulgadas y 50=5 grados de inclinación de la ala.
Encontré algunos paquetes interesantes en internet que pueden ayudar a reducir las iteraciones de prueba y error, el primero es de Ebay, y por el precio que tiene creo que vale la pena probarlo (aún no lo he probado), desafortunadamnte no tiene valor de empuje:

Encontré otro paquete interesante en hobbyking.com y este si tiene valor de empuje con una hélice en especifico (en la sección de prop data), un paquete que a decir verdad quiero probar en algún momento, des afortunadamente le falta el adaptador de hélice, no tengo a la mano el adaptador de hélice que es de su medida.

Reprogramando ESCs
Cuando buscaba información de ESC (sobre todo por las temporizaciones) me encontré que mucha gente tiende a reprogramar los ESC, al parecer es para dar más estabilidad a configuraciones multirotor, en el siguiente enlace podrán encontrar más detalles.
Flashing my ESCs with SimonK Code
Si en algún momento estas interesado en diseñar tu propio ESC (estoy muy tentado a hacerlo) Microchip tiene una nota de aplicación que te puede ayudar.
Brushless DC Motor Control Made Easy, Microchip AN857
Videos de Interés
Recuerda que mencione 3DRobotics
Phoebe, el robot de la portada de MagPi 19
Picopter, cuatrirotor con Raspberry
Raspberry PI – Quadrocopter – Crash (Nunca se les olvide tomar precauciones)
Raffaello D’Andrea: The astounding athletic power of quadcopters (de las cosas más avanzadas que he visto en drones)
Códigos Interesantes
Picopter, Cuatrirotor con Raspberry
RPIO, PWM via DMA en Raspberry.
WiringPi, librería que emula el lenguaje de Arudino en Raspberry.
por último y no menos importante, nuestro repositorio:
https://github.com/tejonbiker/Earhart
Espero les haya gustado esta publicación, leer esto no significa ser un experto en drones, primero hay que quemar y romper algunas cosas, sin embargo creo que llena varios huecos de información cuando uno quiere iniciar con la construcción desde cero de un dron.
Cualquier duda, comentario o corrección no duden en escribir.
Have fun.
 The Inventor's House
The Inventor's House G3ekArmy
G3ekArmy Silayos Bike MTB
Silayos Bike MTB
{kind=link}
diciembre 18, 2014 a las 6:34 am |
Hola saludos me interesa mucho construir un dron me podrian ayudar para conseguir todo los componetes. o donde comprarlos.
febrero 20, 2015 a las 5:48 am |
¿De donde nos visitas?
marzo 4, 2015 a las 3:36 pm |
Buenos dias, estoy interesado en la construir un Drone, soy profesor de la carrera de ingeniería en sistemas y tengo a mi cargo el área de robótica. Me podrían orientar en donde poder adquirir materiales para poder construirlo o información relacionada a Drones. Saludos y buen día.
marzo 4, 2015 a las 5:47 pm |
Buen día Ing. David, hay varios videos en youtube, tal vez lo más difícil de hacer (o aprender) es saber que motores/hélices/baterías/ESC comprar si se requiere de una configuración en especial.
Para esto no hay una guida definitiva.
¿De que Universidad nos visitas?
marzo 4, 2015 a las 6:49 pm
Buen día, pertenezco al Instituto Tecnológico de Altamira. Ya ahorita tengo identificado los motores, cámara y los ESC que se van a utilizar en nuestro proyecto, ahorita nos encontramos en el punto de buscar a proveedores para adquirir las piezas que necesitamos.
marzo 16, 2015 a las 3:13 am
Excelente, ponte en contacto con Valkirias UAV ( pedidos@valkirias.mx ) para que verifiques la disponibilidad de su stock y también veas cual de todo su stock se ajusta a lo que tu buscas.
marzo 16, 2015 a las 6:07 am
Gracias por el dato de Valkirias UAV, me pondré en contacto con el para conocer el inventario. Pronto publicaremos en el portal de trabajo el avance del proyecto. Saludos
marzo 17, 2015 a las 7:51 am
Sería excelente si después nos cuentas como te fue con tu proyecto.
marzo 10, 2015 a las 6:14 pm |
Hola buenos días! .
Mi nombre es matias y estoy cursando el ultimo año de ingeniera electromecanica. .Me gustaría hacer un drone como proyecto final. Me podrias ayudar con cualquier tipo de información.
Desde ya muchas gracias.
Soy de Argentina
marzo 16, 2015 a las 3:29 am |
Hola, bueno pues no se exactamente como podría ayudar
septiembre 7, 2015 a las 7:43 am |
hola matias , soy estudiante de electronica, estoy en la misma situacion que tu ,serial genial si trabajamos en el proyecto juntos, escribremw
abril 5, 2015 a las 2:33 am |
hola
mi nombre es wilmer estamos haciendo de proyecto un dron y quisiera que me faciliten la programación para el dron pero que sea en arduino .
estaré muy agradecido.
abril 20, 2015 a las 9:40 pm |
Hola, buen día, date una vuelta por aquí: http://www.multiwii.com/ en lo personal puedo decirte que el futuro de los drones esta no esta en micros 8 bits (como el arduino) sino en micros de 32 bits (como el pixhawk) con más poder de computo para tareas más complejas.
abril 27, 2015 a las 12:38 pm |
Buen día! me encuentro actualmente en el desarrollo de dos prototipos y actualmente me encuentro en búsqueda de las baterias más adecuadas en rendimiento, existe alguna guía al respecto que conozcan? es posible entablar con ustedes contacto? Saludos!
abril 27, 2015 a las 4:34 pm |
¿Tienes un estimado de la corriente nominal de tu drone?
Puede seguirme en twitter: @tejonbiker , yo soy de Guanajuato
abril 27, 2015 a las 8:29 pm |
Saludos estoy interesado en construir drones. podrías recomendarme algún programa para realizar piezas
abril 27, 2015 a las 9:58 pm |
mis compañeros usan solidworks, me temo que es lo único que sé
abril 28, 2015 a las 7:42 am
Gracias por la información, empezare a documentarme. tu blog es excelente.
May 17, 2015 a las 4:33 am |
Buen día, estoy en un proyecto del colegio para construir un Drone, necesitaría una ayuda en el área de programación y la tarjeta que se necesitaría para tal proceso
junio 10, 2015 a las 4:48 am |
Podrias comenzar por leer algunas tarjetas basadas en Arduino, como lo es el multiwii http://www.multiwii.com
May 21, 2015 a las 12:02 am |
HOLA: MI NOMBRE ES JESÚS CUÉLLAR, SOY UN PRODUCTOR AUDIOVISUAL DE BOLIVIA…NO HACE MUCHO ADQUIRÍ UN HEXACÓPTERO F550; Y TENGO PROBLEMAS PARA DESPEGARLO SE INCLINA HACIA UN COSTADO…TALVEZ SEA CUESTIÓN DE CONFIGURACIÓN…ME PUEDEN AYUDAR POR FAVOR…SE LOS AGRADECERÍA. MI RADIO ES UN FUTABA T8J.
NECESITO HACER UNAS IMÁGENES AÉREAS.
SALUDOS
junio 10, 2015 a las 4:49 am |
Hola, me temo que no tengo suficiente experiencia con ese equipo para ayudarlo en ese rubro, lo siento.
May 23, 2015 a las 2:36 am |
hola estimado, quisiera saber si podrias dejar algun PDF?, osea de algun pdf habras iniciado para la construccion de tu drone.. espero tu respuesta.
junio 10, 2015 a las 4:50 am |
El artículo de MagPi donde aparece el Quad es lo único que he encontrado en PDF de como armar un Quad (aunque debo de decir que no contiene toda la info, pero es algo).
junio 2, 2015 a las 10:03 pm |
gracias por tomarte el tiempo de recopilar esta información, estoy interesado en aprender como se construye un dron, ¿pero que conocimientos técnicos en electrónica o programación debo tener?
un abrazo desde el distrito federal
junio 10, 2015 a las 4:54 am |
Si tu intención solo es construirlo y que vuele, puedes usar un piloto automatico como lo es el Naza de DJI (hay versiones económicas), si lo que quieres es entender lo que pasa dentro de él te recomendaria leer y aprender sobre programación en C, porgramación de Micros, Radiofrecuencia, Construcción de PCBs, Señales y Sistemas, teoría de control entre otras.
junio 9, 2015 a las 10:33 am |
Buenos días soy un alumno del IES d’Aran que junto a dos compañeros (estamos en 1º de bachillerato; conocimientos de rebotica básicos tirando alto…) estamos trabajando en el desarrollo y construcción de un drone. Quería preguntarte si podrías echarnos una mano en este proyecto.
Gracias por adelantado.
Correo de contacto: hockeyramon@gmail.com
junio 10, 2015 a las 4:55 am |
Buen día, no se en que forma pueda ayudarlos, sería bueno si fueran más especificos de los conceptos en que tienen dudas.
junio 26, 2015 a las 12:49 pm |
Hola que tal, mira yo compre un cuadricoptero pero al parecer se desconfiguro y ahora tengo ese problema, me gustaría saber si me puedes orientar en hacer las pruebas necesarias para saber el error, dime donde te escribo para darle los detalles de que fue lo que sucedió haber si me puedes ayudar. Gracias..
junio 26, 2015 a las 2:06 pm |
Hola buen día, apenas estoy aprendiendo el proceso de calibración de modelos comerciales, ¿No puedes poner tus problemas por este medio? probablemente alguien más experimentado que yo pueda aportar a la solución 🙂
julio 22, 2015 a las 4:14 pm |
Buenas tardes.
Lo primero de todo saludos desde España, más concretamente, desde la universidad Carlos III.
Soy estudiante de ing. telemática. Querría orientar mi trabajo fin de grado a los drones y veo que en este blog tenéis un conocimiento muy amplio.
He comprado una Raspberry Pi 2 y querría saber:
– Que SO instalar, y si todo el control del dron se llevaría a cabo a través de dicho software, brújula, acelerómetro, video en streaming, etc.
– Y si a través de dicho tutorial que nos dejas, podría realizar la construcción del mismo desde ya.
Habrá que echarle horas, días y meses, pero así disfrutamos algunos 🙂
Un saludo
y muchas gracias compañeros!
julio 22, 2015 a las 5:04 pm |
El software como esta no esta listo para echar a andar un drone, a decir verdad le falta bastante, hay otro proyecto que me pareció interesante para Raspberry http://www.emlid.com/ checalo,me parece bastante maduro para el tiempo que tiene pero aún así sigue siendo experimental.
julio 27, 2015 a las 10:34 am
Ok, muchas gracias, probaré y te comentaré.
Un saludo:)
agosto 9, 2015 a las 6:20 am |
Buenas saludos!! Estoy finalizando mi carrera de ing. Aquí en Venezuela!! Quería saber si usted me puede ayudar a elaborar un dron pero que sea Armado paso a paso por mi! Quiero basarme en un dron para grabación!! Que dure por lo menos un tiempo de vuelo de 20 minutos o mas!! Favor responder saludos!!
agosto 25, 2015 a las 11:22 pm |
Hola, bueno, son muchos pasos y depende bastante desde que punto lo quieras atacar, cuando digo desde cero, me refiero a hacer el corte laser de los brazos por ejemplo, aunque también puede comenzar comprando todo y armarlo.
agosto 21, 2015 a las 10:43 pm |
Saludos, ¿podrian ayudarme con el modelo matematico del cuadricoptero?
no se que deberia tener en cuenta, las matrices, las ecuaciones, no se si para cada aplicacion existe un modelo matematico diferente….
Lo que quiero hacer es un Control de estabilidad, que el cuadricoptero se mantenga en posicion horizontal frente a perturbaciones. para ello pienso montar una estructura que mantenga el dron fijo en el suelo, pero permitiendole inclinarse en todos los angulos. no va a cambiar de posicion ni de altitud, solo me interesa el angulo de inclinacion.
tambien me interesa lo siguiente por si alguien me puede ayudar:
¿alguien a leido una IMU (MPU6050) usando simulink de matlab?
¿alguien ha implementado control robusto QFT?
agosto 25, 2015 a las 11:24 pm |
Hola buen día, no soy muy matemático a la hora de hacer control, pero te invito a que te unas a la comunidad de Drones Desarrolladores México de Facebook https://m.facebook.com/profile.php?id=663531073755564 he visto gente comentado de modelos de control y sé que algunos usan MATLAB/SIMULINK
agosto 29, 2015 a las 12:37 pm |
muy buena informacion
septiembre 18, 2015 a las 1:37 pm |
Hola! Yo estoy en la construcción de un Drone a fines de la elaboración de una tesis de la carrera de Ingeniería en Automatización y Control Industrial. El punto de objeto de la tesis, ademas de construir el drone, es realizar el software de control de estabilidad en altura, pitch y roll. Para esto estoy buscando alguna plataforma arduino pero necesito que no tenga ningún bootloader, algún controlador virgen, sin bootloader para aprovechar y manipular los recursos del micro a mi antojo, y que sea suficiente para la aplicación, es decir, que tengo suficientes entradas y salidad y puertos de comunicación. Alguien sabe de alguna placa de desarrollo con estas condiciones? Puede ser arduino o cualquier otro fabricante de licencias gratuitas.
gracias a todos
saludos
leonardo
septiembre 18, 2015 a las 3:16 pm |
Hola leonardo, por tu comentario infiero que intentas hacer el software del controlador con AVR Studio o algo similar, la programación de los arduino se hace desde el puerto serial de la computadora (he ahí una de las características de arduino), sin embargo si te interesa una «placa virgen» realmente no tienes porque comprarla virgen, puedes comprar por ejemplo un multiwii y sobreescribir todo su código (incluyendo el bootloader de arduino), para que solo se quede con tu código.
Ve esta imagen, puedes encontrar el puerto de programación como ISP o FTDI:
septiembre 18, 2015 a las 3:46 pm
Hola tejonbiker, gracias por tu pronta respuesta. Si, mi idea es programar con AVR Studio, con lo que me decís, yo podría quitarle el bootloader desde el AVR Studio borrando ¿que memoria? Una vez eso hecho, ¿yo tendría el micro como si lo hubiera adquirido en un tienda de electrónica y listo para ser programado? No comprendo la comparación sobre el multiwii y arduino que hace en el comentario.
Mas allá de que no haga falta borrar el bootloader, el micro debe responder a mi programa en lenguaje C y debo tener acceso a todos los recursos del micro, no puedo permitir que un bootloader este dando vuelta consumiendo tiempos de clock. Debo desarrollar el controlador por lo cual es muy de bajo nivel mi programación.
Gracias
Saludos
Leo
noviembre 9, 2015 a las 4:33 pm
Hola leo, los micro controladores tienen tres memorias, la ROM (o programa), RAM, donde se guardan las variable y los registros de control y la EEPROM, que es memoria persistente, el bootloader se guarda en la ROM, cuando se recibe un código para ser ejecutado en el Arduino este lo coloca por delante del bootloader, para que este siga existiendo.
Cuando grabas un programa propio quitas la parte del bootloader, lo que significa que el método normal de programación no puede ser usado más (a menos que así tu lo programes en tu código).
septiembre 23, 2015 a las 12:42 am |
Hola, saludos, soy estudiante del tec zapopan, y estudio para ingeniero industrial y en sistemas, y tengo un proyecto para construir un drone en autocad o solidworks desde ceros, no se si me podrian ayudar a consegir los planos, o donde puedoconseguirlos
octubre 7, 2015 a las 6:55 pm |
Hola Abrahm, seria muy bueno si primero comentas que tamaños tienes en mente.
octubre 5, 2015 a las 4:49 pm |
Buenos Dias, estoy realizando un dron y vamos en la parte del control, el objetivo para este semestre es lograr que el dron se eleve y mantenga cierta altura estable y descienda suavemente cuándo se le indique, me podrian ayudar con que sensores se necesitan para realizar esto? y como sería la idea del algoritmo? la idea es programar en pic. Gracias
octubre 7, 2015 a las 6:57 pm |
Hola, desafortunadamente no he podido encontrar un concentrado de como es la programación y algoritmos de un dron, en IEEExplore puedes encontrar varios artículos científicos, con muchos modelos matemáticos, muchos de los artículos solo llegan a simulación.
En cuanto a la programación en un PIC no he escuchado que alguien lo haga (o al menos no público).
octubre 6, 2015 a las 9:27 pm |
como hago la programacion del dron, me gustaria crear y comprar piezas con alguna guia
octubre 7, 2015 a las 7:01 pm |
Hola, depende a que nivel quieras hacer la «programación», si es a nivel de algoritmos de control, me temo que no he encontrado una fuente que concentre lo necesario, si te refieres a como «programar» el controlador con el código ya hecho (es decir grabar la tarjeta con el firmware correspondiente) eso dependerá de la tarjeta que escojas (Pixhawk, APM, CC3D, entre otras).
¿A que nivel te interesa programarlo?
En Cuanto a guías de como construir, puede leer el articulo MagPi al que hago referencia, ahí viene una lista de materiales.
octubre 7, 2015 a las 6:19 pm |
Abra programas ya hechos de frames o chasis de drones ya creados en solidwork ??
octubre 7, 2015 a las 7:06 pm |
No estoy seguro, he visto algunos cuantos frames para impresión 3D en Instructables, depende mucho de que tamaño tengas en mente el dron.
http://www.instructables.com/id/3D-Printed-Quadcopter-with-Arduino/
octubre 7, 2015 a las 9:07 pm |
que empresa es la que te distribuye motores y piezas de el dron..
octubre 12, 2015 a las 7:22 pm |
Buenas, estoy realizando un proyecto en el tengo que elaborar programar un drone. Me estoy informando de muchas cosas para poder hacer un drone verdaderamente funcional. Mi correo es vidrone.ing@gmail.com si podríamos hablar sería de mucha ayuda. Gracias
noviembre 9, 2015 a las 4:38 pm |
Listo
octubre 16, 2015 a las 9:55 pm |
Sabras de alguna pagina donde yo pueda programar mi arduino para mi dron.
octubre 28, 2015 a las 4:22 pm |
hola, me puedes asesorar dado que gracias a tus consejos, he juntado estos articulos para la construccion de un drone, me puedes decir si me falta algo mas o si estoy equivocado en algo:
– F450 Quadcopter Frame x1
– APM 2.6 Flight Control w/case x1
– 6M GPS x1
– 2212 920KV Brushelss Motor (2x CW, 2x CCW) x4
– 30A SimonK ESC x4
– 9443 Propeller CW/CCW x 2pairs (without the lock)
– ESC Connect Board Set x1
– 3.5mm gold bullet plug x 12 (12 pcs female)
– Heat shink tube x2 (50cm yellow + 50cm black)
– 3in1 Gadget Lipo Battery Monitor descubrimiento zumbador & la pérdida de señal de alarma para 2-6s
– Turnigy nano-tecnología LiPo Batería Li-Polymer 3s 4000mah 25 Centavos
– Radiolink AT10 2.4 g 10ch Transmisor C / r10d receptor & prm-01 Voltaje a40c
la radio es mas de lo que necesita el drone pero pense en comprarme una buena para poder mejorar el drone en el futuro
noviembre 9, 2015 a las 4:41 pm |
Puedes probar con esas configuraciones, cuando pidas las cosas trata de pedir hélices de 10 pulgadas, para experimentar cual de los dos diámetros se adaptan mejor a tus necesidades, no se te olvide balancear las hélices antes de usarlas.
octubre 29, 2015 a las 9:16 pm |
Los drones se profran programar con arduino uno ???
noviembre 8, 2015 a las 5:56 pm |
hola, amigo mi nombre es armando Zamudio, quiero construir un drone desde 0 y me interesaría que me pudieras ayudar dándome información, de las tiendas donde puedo conseguir piezas.
especialmente si las tiendas se encuentran en México DF o el estado de florida USA para mi seria mas fácil
noviembre 9, 2015 a las 4:45 pm |
Hola, desafortunadamente no he ido a Florida, tampoco conozco, en México he checado esta página y me parece que esta bien:
http://store.goandfix.com/
noviembre 10, 2015 a las 3:40 am |
Que tal amigo, te felicito por tu blog y el material que compartes, sirve mucho de inspiración. Te pago mi correo kasparovs @ hotmail, estoy trabajando con arduino y raspberry pi.
Saludos
May 20, 2018 a las 4:34 am |
Hola Claudio, por el momento estoy estoy muy enfocado en mi trabajo y no me he concentrado mucho en el tema de drones, espero retomarlo mas adelante con más recursos.
noviembre 27, 2015 a las 12:26 pm |
Que bueno que se comparta tanta información y conocimientos.. Esta super heee la verdad que esta un poco difícil pero vale la pena intentar e investigar y solo así nos habremos educado más..
diciembre 18, 2015 a las 12:56 am |
Hola a todos . estoy iniciando un proyecto de alas voladoras.doy de México alguien sabe donde puedo nabara construir mmodelo de espuma Epp. Adicional alguien sabe donde puedo aprender a fabricar motores brushles que sean como los comerciales les dejo ni correo por si me pueden ayudar md4@eninfinitum.com
May 20, 2018 a las 4:38 am |
Se que hay empresas de poliestireno expandido (unicel) que hacen moldes y otras cosas, tendrías que acercarte con ellos.
El detalle de fabricar motores brushless es que es todo un proceso de ingeniería (al menos construirlos desde cero), se requiere conocimiento en maquinados, propiedades eléctricas y magnéticas de los materiales, toda una ciencia, lo que podrías hacer es reebobinar un motor a partir de la estructura de uno existente.
enero 12, 2016 a las 12:28 am |
SALUDOS TENGO UN DRON Drone con Camara JJRC H10 Y PARACE QUE SE DESCONFIGURO, SE PUDEN REPARAR? O QUE SE LE PUEDEN HACER?
ESPERO ME AYUDEN
GRACAIS
enero 26, 2016 a las 7:40 pm |
Buenas, muy interesante el artículo y veo que controlas mucho del asunto.
Yo tengo un problema con un Drone ya q se me ha roto un motor y no tiene ninguna especificación del tipo que es. El fabricante tampoco me da información al respecto y en las tiendas parece que no les interesa arreglado.
Hay forma de saber el tipo de motor por su tamaño o algo así?
Mi Drone es un Aee toruk ap10.
Gracias de antemano
May 20, 2018 a las 4:40 am |
Si el fabricante no te da información del motor sería difícil determinar un reemplazo, lo que puedes hacer es reemplazar los cuatro motores por motores de tamaño similar.
marzo 23, 2016 a las 6:49 pm |
Hola estoy iniciando mi propio proyecto relacionado con drones, y quisiera ponerme en contacto contigo por correo el mio(marlon.espinosa@estudiantes.uo.edu.cu), tengo muchas preguntas e ideas, pero soy un poco nuevo en la materia, podriamos ponernos en contacto???. Ah por cierto tu blog esta genial, aclaré muchas dudas que tenía sueltas, jeje.
May 20, 2018 a las 4:50 am |
desafortunadamente estoy muy concentrado en mi trabajo y no he tratado el tema de drones desde hace tiempo.
marzo 23, 2016 a las 6:56 pm |
Hola como me pongo en contacto con usted???
May 20, 2018 a las 4:50 am |
Hola, ¿De que quieres hablar?
May 5, 2016 a las 7:40 pm |
buenas tardes soy ingeniera electrónica y quiero preguntar si alguien me puede colaborar estoy construyendo un drone con tarjeta raspberry pi 3 mod b ,necesito saber como lo programo en el sistema operativo de windows 10 iot core. mil gracias si alguien me puede brindar información, o como guiarme.
May 20, 2018 a las 4:49 am |
De windows 10 IoT core no conozco nada, no puedo ayudarte.
agosto 12, 2016 a las 12:21 pm |
Hola buen día, estoy construyendo un dron para un proyecto, y quisiera que me orientara en la parte de la programación, lo estoy programando en la Rasberry pi 2 En el lenguaje Python
May 20, 2018 a las 4:48 am |
desafortunadamente estoy muy concentrado en mi trabajo y no he tratado el tema de drones desde hace tiempo.
agosto 12, 2016 a las 1:30 pm |
hola estoy elaborando un dron para un proyecto Universitario quisiera que me pudieran orientar en la parte de la programación, lo estoy programando el el lenguaje Python en una Rasberry pi 2
May 20, 2018 a las 4:48 am |
desafortunadamente estoy muy concentrado en mi trabajo y no he tratado el tema de drones desde hace tiempo.
septiembre 8, 2016 a las 3:11 pm |
Hola buenos dias . queria ver si me podrian ayudar
con la construccion de un dron. es para un proyecto
May 20, 2018 a las 4:48 am |
desafortunadamente estoy muy concentrado en mi trabajo y no he tratado el tema de drones desde hace tiempo.
septiembre 28, 2016 a las 12:20 pm |
Hola amigo, estoy haciendo un drone cuadcopter desde cero con una tarjeta Raspberry Pi2, tongo problemas con el código para controlar los motores ya que algunos tienen mas potencia que otros (los cuatro motores son de la misma característica) y el control de vuelo es malo.
Tienes una sugerencia para mi te agradecería.
May 20, 2018 a las 4:47 am |
¿Has caracterizado cada motor por separado? ¿Como llegaste a la conclusión de que los motores tienen «mas» potencia que otros?
septiembre 28, 2016 a las 12:31 pm |
eduar030696@gmail.com es mi correo estoy construyendo un dron con tarjeta Raspberry pi 2 tendrás código o manual para informarme mas acerca de este.
octubre 2, 2016 a las 5:17 am |
Buen día soy Nestark y quisiera saber si se puede construir un dron cuadricoptero con solo arduinos sin necesidad de controladores de vuelo y tampoco control de RC solo con arduinos modulos de NRF24l01 y acelerometro de 3 ejes
May 20, 2018 a las 4:46 am |
Se puede:
http://www.instructables.com/id/How-to-Make-a-Drone-Using-Arduino-Make-a-Quadcopte/
Ahí el detalle sería enviar la información desde el modulo inalambico que mencionas en lugar del típico PPM o entrada por PWM.
enero 30, 2017 a las 8:36 pm |
Buen día, sabes de casualidad como hacer un control remoto para un dron desde cero?
May 20, 2018 a las 4:42 am |
Una opción es un usar un transmisor estandar y un control estandar, ¿Algún motivo en especial por lo cual tengas que hacer tu propio control?
May 18, 2019 a las 5:56 am |
Hola , buenas noches , estoy iniciando el proyecto de construir un dron desde cero , y al igual me gustaría realizar la placa de control de vuelo , que microcontrolador me recomendaría para implementarlo en la controlador de vuelo , antemano muchas gracias
May 20, 2019 a las 12:26 am |
Hola Alex, no le he dado mucha continuidad a este tema, sin embargo he visto algunos proyectos que hasta la actualidad siguen funcionando, te dejo algunos.
http://ardupilot.org/
https://store.mrobotics.io/Default.asp